02. 微分概要
微分概要
在上一课,你学习了 导数 。本节课只是复习过去学到的知识。
理解导数
你了解到了一些理解导数的方法。
1. 对"变化率"的解释
如果 f(t) 给出了在 任何 t 的值,那么 \dot{f}(t_0) 会给出 f(t) 在数值 t=t_0 的变化率。
2. 图形解释
与 f(t) 在 t=t_0 相切的直线的斜率是 \dot{f}(t_0) 。
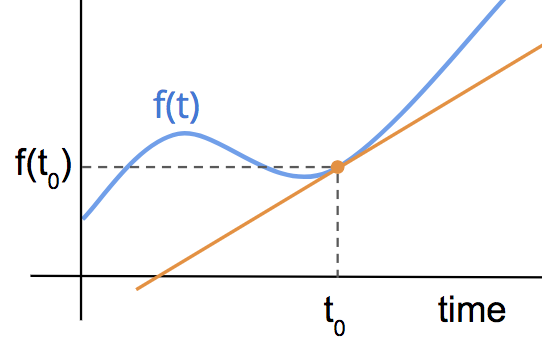
橙色线的斜率等于 f 在 t = t_0 处的 导数 。
3. 正式定义
正式的 数学定义如下:
函数 f(t) 的 导数 是函数 \dot{f}(t) (or \frac{df}{dt} ),定义为:
导数和运动
位置 、 速度 和 加速度 在描述车辆的运动时都是有用的量,这些量通过导数相互关联。
-
速度是位置的导数
-
v(t)=\dot{x}(t)
-
加速度是速度的导数和位置的二阶导数。
-
a(t) = \dot{v}(t) = \ddot{x}(t)
编码导数
def get_derivative_from_data(position_data, time_data):
"""
Calculates a list of speeds from position_data and
time_data.
Arguments:
position_data - a list of values corresponding to
vehicle position
time_data - a list of values (equal in length to
position_data) which give timestamps for each
position measurement
Returns:
speeds - a list of values (which is shorter
by ONE than the input lists) of speeds.
"""
# 1. Check to make sure the input lists have same length
if len(position_data) != len(time_data):
raise(ValueError, "Data sets must have same length")
# 2. Prepare empty list of speeds
speeds = []
# 3. Get first values for position and time
previous_position = position_data[0]
previous_time = time_data[0]
# 4. Begin loop through all data EXCEPT first entry
for i in range(1, len(position_data)):
# 5. get position and time data for this timestamp
position = position_data[i]
time = time_data[i]
# 6. Calculate delta_x and delta_t
delta_x = position - previous_position
delta_t = time - previous_time
# 7. Speed is slope. Calculate it and append to list
speed = delta_x / delta_t
speeds.append(speed)
# 8. Update values for next iteration of the loop.
previous_position = position
previous_time = time
return speeds